Z močnim razvojem elektronske industrije se zaznavanje položaja nekaterih strukturnih komponent počasi spreminja od prvotne kontaktne meritve do brezkontaktne meritve skoziHallov senzor položaja in magnet. Kako lahko izberemo ustrezen magnet glede na naše izdelke in strukturo? Tukaj naredimo nekaj preprostih analiz.
Najprej moramo določiti material magneta. Trenutno se samarijev kobaltov magnet in neodim železov bor pogosto uporabljata v senzorju položaja Hall. Glavna razlika med obema magnetoma je v tem, da so magneti NdFeB, ki temeljijo na isti prostornini, močnejši od samarijevih kobaltnih magnetov; toplotni odmik samarijevega kobalta je manjši kot pri Nd-Fe-B; oksidacijska odpornost samarijevega kobalta je močnejša kot pri Nd-Fe-B, vendar je na splošno na zunanji strani magneta prevleka, ki lahko reši problem oksidacije; samarijev kobaltov magnet ima boljšo temperaturno odpornost kot magnet NdFeB, vendar lahko vrednost temperaturne odpornosti za oba magnetna materiala doseže več kot 200 ℃. Zato moramo pri izbiri vrste magneta oceniti v kombinaciji s stroškovno učinkovitostjo, delovno temperaturo in delovnim okoljem. Na splošno se lahko NdFeB uporablja več, predvsem zato, ker ima najboljše lastnosti magnetnega polja. Vendar pa je pri delu v širokem temperaturnem območju priporočljivo izbrati samarijev kobaltov magnet zaradi majhnega toplotnega odnašanja.
Poleg tega moramo določiti nekaj osnovnih parametrov magneta. Glede na informacije o preskusnem položaju in smer gibanja predmeta določimo, ali je smer magnetizacije magneta diametralna ali aksialna. Poleg tega se določi, ali izbrati akvadratni magnetali acilindrični magnetglede na strukturo namestitve. Seveda moramo včasih prilagoditi obliko magneta glede na strukturo. Obstaja še en dejavnik zahteve glede magnetnega toka, ki je bil vedno naša skrb pri izbiri magneta. Pravzaprav ga moramo analizirati z naslednjih dveh vidikov:
1. Moč magnetnega polja, ki ga inducira sam Hallov senzor položaja, in obseg induciranega magnetnega polja v vsaki smeri bosta jasno označena v podatkovni knjigi senzorja.
2. Razdalja med magnetom in samim senzorjem je običajno določena s strukturo izdelka. Glede na zgornja dva vidika in krivuljo spremembe magnetnega polja na spodnji sliki kot primer lahko določimo jakost magnetnega polja zahtevanega magneta.
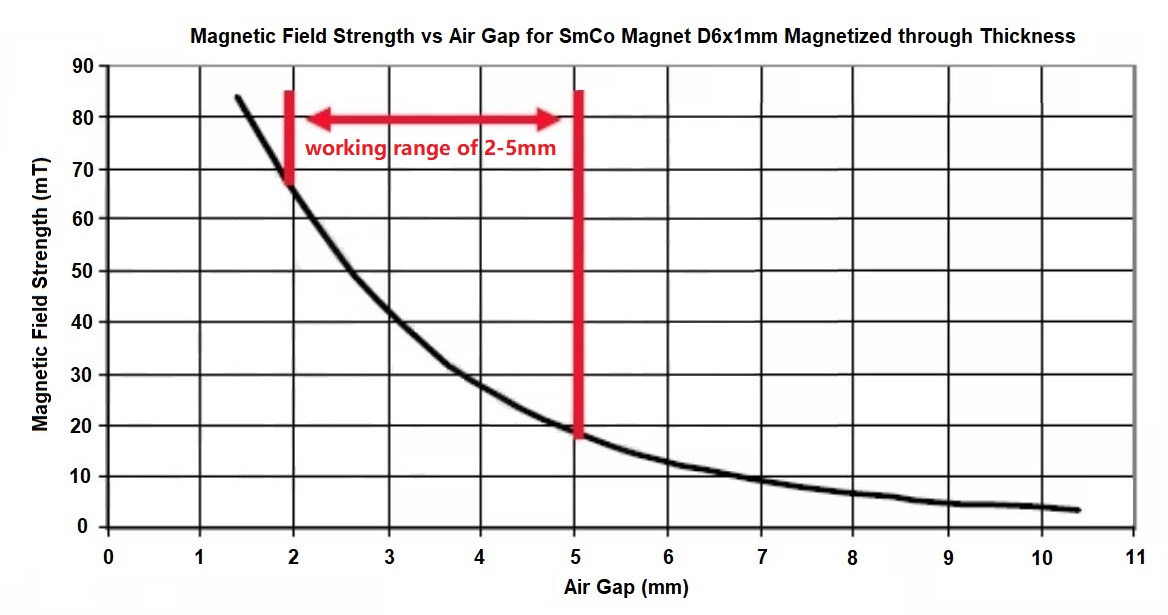
Nazadnje moramo razumeti, da to ne pomeni, da je magnet lahko čim dlje od senzorja, dokler magnetno polje pade na zahteve senzorja. Čeprav ima sam senzor funkcijo kalibracije, moramo razumeti, da ko je magnet predaleč od senzorja, je distribucija magnetnega polja sama po sebi težko zagotoviti linearnost ali skoraj linearnost. To pomeni, da bo s spremembo položaja in nelinearno porazdelitvijo samega magnetnega polja meritev senzorja postala zapletena in kalibracija bo postala zelo zapletena, tako da produkt nima reducibilnosti.
Zgoraj je le preprosta analiza izbire magneta v aplikacijah Hallovega senzorja. Upamo, da vam bo v pomoč. Če imate med razvojnim procesom druga vprašanja, se obrnite na nas,Ningbo Horizon Magnetics. Lahko vzpostavimo nadaljnjo komunikacijo in vam zagotovimo tehnično podporo.
Čas objave: 12. avgusta 2021